This is an Alps fader which is basically a linear 10K potentiometer that has a small DC motor mounted on the back. It has a 100mm travel length and the fader control is touch sensitive. Mouser and other suppliers have them, though I cannot recommend hobbyists buying them through these channels as they are quite expensive. I have seen them on eBay and other auction sites at significant savings.
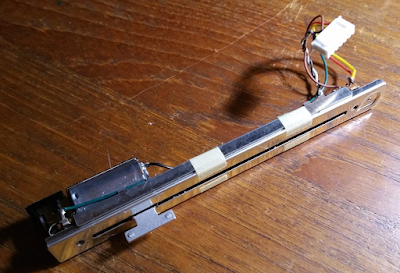


The motor is mounted along the axis of the linear fader making a very low profile solution. The motor drives a toothed belt to move the fader to any position desired remotely. The motor is a simple DC motor that can be driven by up to 10 VDC.

So, one could envision simply putting a voltage across the pot and connecting the wiper to an Arduino analogue input. Moving the pot would report a digital number from 0-1023 at any given instant in time representing the voltage across the pot at the wiper and therefore, the relative position of the fader control.
However, if we wanted to simply tell the fader to position itself to any of its 1024 positions it is capable of, we would basically need to turn the motor on and drive it in the correct direction while reading the pot position until it attains the correct value. This would be an appropriate application for a PID controller.
To control a DC motor, it is most convenient to use an H-Bridge circuit. As can be seen by the circuit diagram below, turning on Q1 and Q4 will drive the motor in one direction whilst turning on Q3 and Q2 will drive the motor in the opposite direction. As an addition feature turning on Q1 and Q2 or Q3 and Q4 will short out the power supply and allow for stress testing your circuit protection implementation...

In reality, there are nice single chip H-Bridge solutions that not only allow for controlling the motor direction, but also allow for PWM control of motor speed. Most suppliers of robotics components will have typical examples of these controllers as well as places like Adafruit and Sparkfun.
In my next posting, I will get into the details of the hookup and programming of the PID controller for this fader. More to come...